



Accessory movements of the joints of the fingers
Similar accessory movements of anteroposterior
gliding and rotation are possible at each of the metacarpophalangeal and
interphalangeal joints of all four fingers. With the proximal component
stabilized between the thumb and index finger, the more distal segment can be
made to execute the accessory movements.
Biomechanics
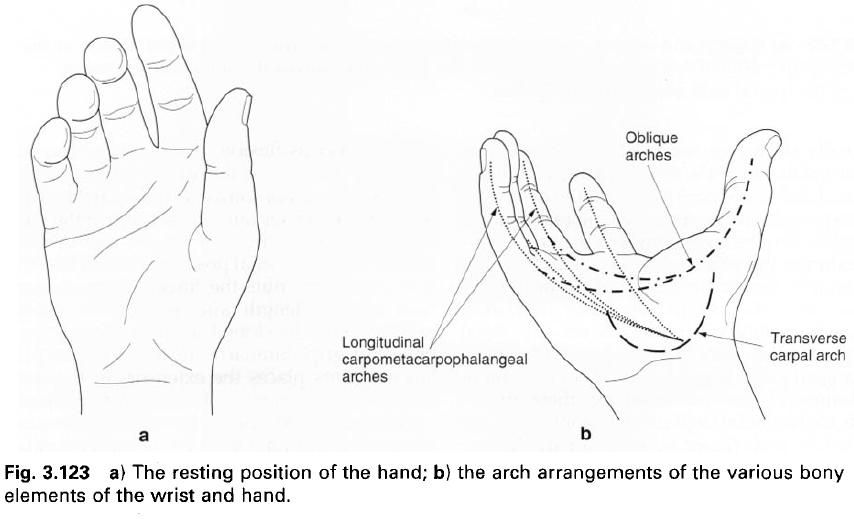
The arrangement of bones, tendons and ligaments
within the hand is such that in the
so-called position of rest the palm is hollowed, the fingers are flexed and the
thumb is slightly opposed(picture a). The flexion of the fingers increases
progressively from the index to the little finger. Underlying the hollowing of
the palm and facilitating gripping movements, the bony skeleton can be seen to
form a series of arches running in three different directions(picture b).
Transversely is the carpal arch maintained by the flexor retinaculum. It
continues distally as far as the heads of the metacarpals as the metacarpal
arch. The long axis of this “gutter” crosses the lunate, capitate and third
metacarpal. The concavity of this arch at the level of the metacarpal heads is
much shallower, and more widespread than at the level of the carpal bones. The
shallowness of the arch at the metacarpal heads can be readily seen and
appreciated in the relaxed hand.
Running longitudinally are the carpometacarpophalangeal arches, which open out
from the wrist and are formed for each digit by the corresponding metacarpal
and phalanges. These arches are concave on their palmar surface, with the
keystone of each being at the level of the metacarpophalangeal joint.
Consequently, muscular imbalance at this point interferes with the concavity of
the arch. Of these longitudinal arches, the two most important are those of the
middle and index fingers. During opposition of the thumb with the fingers,
oblique arches are formed running from the thumb into the finger being opposed.
The most important oblique arch is that linking the thumb and index finger
because of its use in holding objects, such as a pen.
When the palm is hollowed, an oblique gutter,
the palmar gutter, runs across the various oblique arches formed with the thumb
from the base of the hypothenar eminence, where the pisiform can be palpated,
to the head of the second metacarpal. It corresponds approximately to the
palmar crease(“life line”), and is the direction taken by the handle of a tool
when fully grasped by the hand.
In use, the hand
does not always utilize the various arches. When carrying large and heavy flat
objects the hand spreads out and becomes flattened, so that contact with the
object is made at the thenar and hypothenar eminences, the metacarpal heads and
the anterior surfaces of the phalanges. This provides a large area of contact
and support, with movement of the object limited by friction between it and the
skin.
The digits may be used individually as
circumstances dictate. Being functionally separate from the remaining digits,
the thumb can be moved and used independently. Although not completely
separate, the index finger has a considerable degree of freedom, for example it
can be used independently in pointing and gesturing. The relative freedom of
the index finger is important in grasping. The remaining fingers cannot be used
independently throughout their full range of movement principally because of
the linkage between the tendons of extensor digitorum on their dorsal surfaces.
Prehension(grip)
The way in which the hand is used depends upon several factors, not least of which are
the size, shape and weight of the object as well as the use to which it is
being put. In general terms, the grip can be classified as being either a
“precision grip” or a “power grip”. The thumb and the fingers combine in
various ways to produce the former, while the hand becomes involved in the
latter.
Precision
grips. In precision grips the
object is usually small, and sometimes fragile. It is seized between the pads
of the digits, which spread around the object confirming to its shape(figure
a). The action involves rotation at the carpometacarpal joint of the thumb, and
at the metacarpophalangeal joints of the thumb and finger(s) involved. The
muscles involved in precision grips are all the small muscles of the hand, as well as the flexors digitorum profundus and superficialis, and pollicis longus.
Within this class of grip, several types can be identified:
- terminal opposition ( pincer grip) in which the tips of the pads or sometimes the edges of the nails are used to pick up fine objects, such as a pin-this is the finest and most precise of all precision grips, and consequently is the most easily upset in traumas of the hand;
- subterminal opposition in which the palmar surfaces of the thumb and index(or other) finger come into contact as when holding a pen – it is the most common form of precision grip, with its efficiency being tested by attempting to pull a sheet of paper from between the thumb and index finger;
- subtermino-lateral opposition (key grip) in which the pad of the thumb presses against the side of any of the phalanges of the finger – the grip is less fine but strong and can replace and above when the distal phalanx of the index finger has been lost;
- adduction between two fingers, usually the index and the middle, with the thumb playing no part in the grip – the grip is weak and generally has little precision; however, with loss of the thumb it can be considerably developed in terms of power.
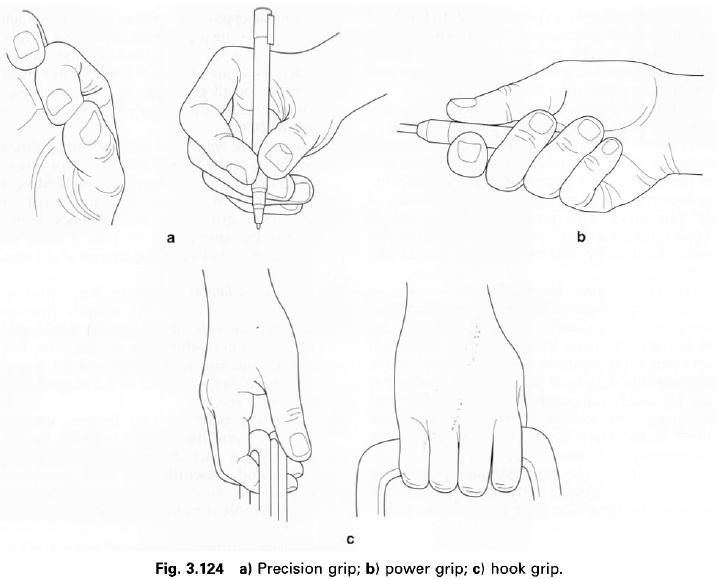
Power
grips. In power grips, where
considerable force may be required, the hand
comes into action(picture b). The long flexors and extensors work strongly
partly to fix the wrist and partly to grip the object. Two modes of power grip
can be identified:
- a palmar grip, which is the most powerful, in which the whole hand wraps itself around the object whose long axis lies along the palmar gutter – with the thumb acting as a buttress the fingers close around the object: the volume of the object determines the strength of the grip, which is maximal when the thumb can still touch the index finger; as a result the handles of many tools are sculptured to accommodate the fingers;
- hook grip in which the object is held firmly between the palm and the flexed fingers, the thumb playing no part at all – the grip is relatively secure but in one direction only, towards the fingers; consequently it is the grip employed in carrying bags and suitcases(figure c).
One activity in which both types of grip can be
seen, albeit in different hands, is when hammering in a nail. The nail is held
precisely between the thumb and index finger, while the hammer is firmly held
using a palmar grip.
Joint
forces
Because of the size and weight of many objects
that are carried or manipulated, the forces transmitted across various joints
within the hand and digits can reach
considerable magnitudes. An indication of the magnitudes of these forces has
been required in order to refine finger prostheses. Studies have suggested that
the joint reactions at the carpometacarpal, metacarpophalangeal, proximal and
distal interphalangeal joints are on average twice, three times, ten times and
six times the applied load respectively. The magnitude and direction of action
of these forces at various joints have led to predictions of clinical
deformities and joint damage.









0 коментара:
Постави коментар